

De Mission Pad wordt gebruikt met de Tello EDU bij gebruik van de Tello SDK 2.0 voor programmeren. De Tello EDU gebruikt zijn camera om de Mission Pad-ID te detecteren en voert opdrachten uit.
Er zitten 4 dubbelzijdige Mission Pads in het Tello EDU-pakket, waarbij elke zijde een uniek patroon bevat dat bestaat uit planeten, een raket en een ID.
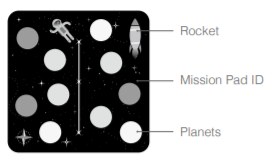
Raket geeft de voorwaartse richting van de X-as aan.
De ID is een cijfer tussen 1 en 8 dat op elke kant van de Mission Pad is gedrukt.
Planeten vertonen verschillende patronen die de ID en coördinaten aangeven, die de Tello EDU kan herkennen.
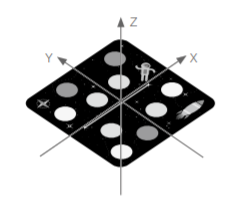
Coördinatenbeschrijvingen
Het patroon van elk Mission Pad geeft een 3D-coördinaat aan. De oorsprong bevindt zich in het midden van de Mission Pad en het plan van de pad vertegenwoordigt de X- en Y-as. Elke Mission Pad heeft unieke coördinaten, zodat de Tello onderscheid kan maken tussen pads.
Operatie
Om te kunnen werken, heeft de Mission Pad een Tello EDU met SDK 2.0 nodig.
- Plaats de Mission Pad op een vlakke ondergrond en pas de richting van de raket naar wens aan.
- Schakel mission pad-detectie in op de Tello EDU met behulp van het “mon” -commando. Plaats de drone in het midden van de Mission Pad en gebruik het “mdirection x” commando om voorwaartse of neerwaartse cameradetectie in te schakelen.
- Gebruik het “takeoff” commando om de Tello EDU op te laten stijgen en op zijn plaats te laten zweven. Gebruik een commando met “mid” om een Mission Pad te herkennen en er naartoe te vliegen.
Commando beschrijvingen
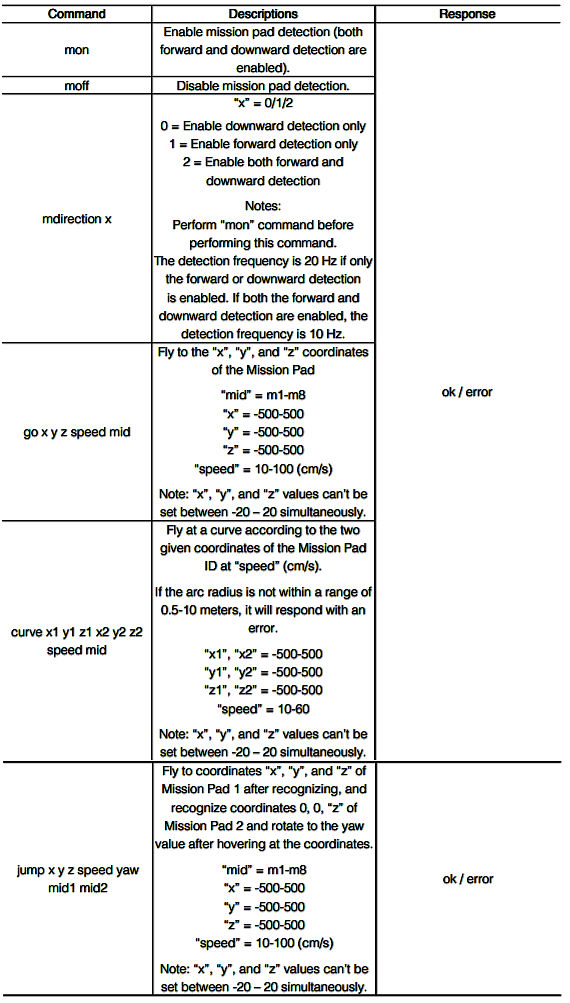
mid = de Mission Pad-ID.
ml tot m8 = het bereik van Mission Pad-ID’s.
m-1 = de Tello EDU selecteert willekeurig een Mission Pad.
m-2 = de Tello EDU selecteert de smalste Mission Pad die wordt gedetecteerd.
Voorbeeld: ga 100100100 60 ml
Nadat de missiepaddetectie is ingeschakeld, detecteert de Tello EDU de Mission Pad gemarkeerd met 1. Als de Mission Pad succesvol wordt herkend, vliegt de Tello EDU met een snelheid van 60 cm/s naar de coördinaten (100, 100, 100). Als de Mission Pad niet wordt herkend, blijft de Tello EDU op zijn plaats zweven en wordt een “fout”-bericht ontvangen op de pc, Mac of het mobiele apparaat.
Voorbeeld: bocht 100100100500500500 40 m2
Nadat de missiepaddetectie is ingeschakeld, detecteert de Tello EDU de Mission Pad gemarkeerd met 2. Als de Mission Pad succesvol wordt herkend, vliegt de Tello EDU met een snelheid van 40 cm/s in een bocht naar de coördinaten (100, 100, 100) en vervolgens naar de tweede coördinaten (500, 500. 500). Als de Mission Pad niet wordt herkend, blijft de Tello EDU op zijn plaats zweven en wordt er een “fout”-bericht ontvangen op de pc, Mac. of mobiel apparaat.
De curve wordt bepaald door drie punten. In dit voorbeeld zijn dit de huidige positie van de Tello EDU, de eerste coördinaten (100, 100, 100) en de tweede coördinaten (500, 500, 500). Als die drie punten op een rechte lijn liggen of als ze geen cirkel vormen met een straal binnen 0,5 m tot 10 m. dan blijft de Tello EDU op zijn plaats en wordt een “fout”-bericht ontvangen op de pc, Mac of het mobiele apparaat.
Voorbeeld: sprong 100100100 40100 ml m2
Nadat de missiepaddetectie is ingeschakeld, detecteert de Tello EDU de Mission Pad gemarkeerd met 1. Als de Mission Pad succesvol wordt herkend, vliegt de Tello EDU met een snelheid van 40 cm/s naar de coördinaten (100, 100, 100) en blijft dan op zijn plaats zweven. Vervolgens detecteert de Tello EDU de Mission Pad gemarkeerd met 2 en draait hij 100°. Als een van de pads niet wordt herkend, blijft de Tello EDU op zijn plaats zweven en wordt een “fout”-bericht ontvangen op de pc, Mac of het mobiele apparaat.
Detectiebereik
- Hoogte: 0,3 – 1,2 m
- Bereik (hoogte van 0,3 m): 0,4×0,4 m
- Bereik (hoogte van 1,2 m): 1×1 m


- De Tello EDU kan geen Mission Pad detecteren buiten het detectiebereik en midden commando’s kunnen gedurende deze tijd niet worden uitgevoerd.
- Het wordt aanbevolen om de Mission Pad op een vlakke ondergrond met duidelijke patronen te plaatsen. Het is mogelijk dat Tello EDU een Mission Pad niet herkent die op een oppervlak is gelegd die alleen zwart of wit is.
- Zorg voor voldoende omgevingslicht. Als het te licht of te donker is, heeft dit invloed op de Tello EDU om een Mission Pad te herkennen.
- Tello EDU kan geen mid-opdrachten uitvoeren als cameradetectie vooruit is ingeschakeld.
BRON: https://www.ryzerobotics.com/