
")
Een robotarm is een soort mechanische arm, meestal programmeerbaar, met vergelijkbare functies als een menselijke arm; de arm kan de som zijn van het mechanisme of kan deel uitmaken van een complexere robot. De schakels van een dergelijke manipulator zijn verbonden door gewrichten die ofwel een roterende beweging (zoals in een gelede robot) ofwel een translatie (lineaire) verplaatsing mogelijk maken. De schakels van de manipulator kunnen worden beschouwd als een kinematische ketting. Het uiteinde van de kinematische keten van de manipulator wordt de eindeffector genoemd en is analoog aan de menselijke hand.
De robotarm kan worden ingedeeld in hoeveel richtingen hij kan bewegen. Dat noemde vrijheidsgraden
Vrijheidsgraden (DOF)
De vrijheidsgraden, of DOF, is een zeer belangrijke term om te begrijpen. Elke vrijheidsgraad is een gewricht op de arm, een plek waar hij kan buigen of draaien of vertalen. U kunt het aantal vrijheidsgraden doorgaans identificeren aan de hand van het aantal actuatoren op de robotarm.
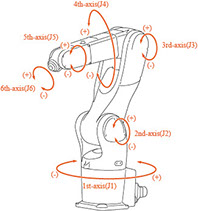
De Arduino braccio is een 6-assige robotarm.

Het wordt zes vrijheidsgraden of zesassige robot genoemd omdat het op zes verschillende assen kan draaien. De volgende lijst specificeert de functies van elke as.
As 1 – Deze bevindt zich aan de basis van een robot en helpt hem van links naar rechts te draaien.
As 2 – Het helpt de onderarm van een robot om op en neer te bewegen.
As 3 – Hiermee kan de bovenarm van een robot vooruit en achteruit bewegen.
As 4 – Deze as staat bekend als polsrol en roteert de bovenarm van een robot in een cirkelvormige beweging.
As 5 – Hiermee kan de pols van de robotarm omhoog en omlaag worden gebracht.
As 6 – Hiermee kan de pols van de robotarm vrij draaien in een cirkelvormige beweging.
Alle bovenstaande zes assen worden aangestuurd met behulp van servomotoren.
Servomotor
De servomotor is meestal een eenvoudige gelijkstroommotor die wordt bestuurd voor een specifieke hoekverdraaiing met behulp van extra servomechanismen (een typisch terugkoppelingsregelsysteem met terugkoppeling). Het servosysteem van vandaag heeft grote industriële toepassingen.
De belangrijkste reden achter het gebruik van een servo is dat het een hoekprecisie biedt, dwz dat het alleen zo veel draait als we willen en dan stopt en wacht op het volgende signaal om verdere actie te ondernemen. De servomotor is anders dan een standaard elektromotor die begint te draaien zoals wanneer we er stroom op zetten, en de rotatie gaat door totdat we de stroom uitschakelen.

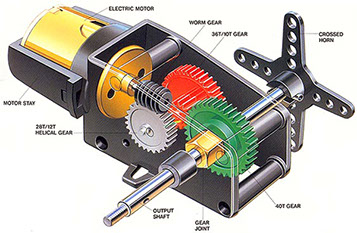
Wat zit er in de servo?
Om volledig te begrijpen hoe de servo werkt, moet je onder de motorkap kijken. Binnenin is er een vrij eenvoudige opstelling: een kleine DC-motor, potentiometer en een stuurcircuit. De motor is met tandwielen aan het stuurwiel bevestigd. Terwijl de motor draait, verandert de weerstand van de potentiometer, zodat het stuurcircuit precies kan regelen hoeveel beweging er is en in welke richting.
Wanneer de as van de motor zich op de gewenste positie bevindt, wordt de stroomtoevoer naar de motor gestopt. Zo niet, dan wordt de motor in de juiste richting gedraaid. De gewenste positie wordt via elektrische pulsen door de signaaldraad gestuurd. De snelheid van de motor is evenredig met het verschil tussen de werkelijke positie en de gewenste positie. Dus als de motor zich in de buurt van de gewenste positie bevindt, zal hij langzaam draaien, anders snel. Dit heet proportionele regeling. Dit betekent dat de motor slechts zo hard draait als nodig is om de taak uit te voeren, een zeer efficiënte kleine man.
De bovenstaande details leggen uit waar de robotarm van is gemaakt en door het principe en de plaatsing van de servomotor te begrijpen, kan de arm dienovereenkomstig worden bestuurd.