

De Braccio is een volledig operationele robotarm, bestuurd via Arduino. Het kan op verschillende manieren worden gemonteerd voor meerdere taken, zoals het verplaatsen van objecten. U kunt ook een camera of zonnepaneel bevestigen. Er zijn zoveel manieren waarop de Braccio het bereik van uw apparaten kan vergroten.
De Braccio wordt in losse onderdelen geleverd in een doos.

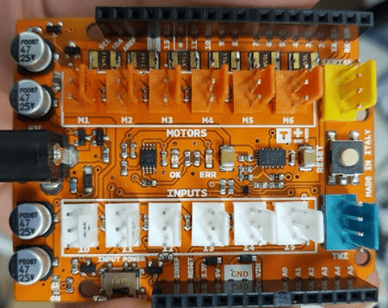
Braccio Shield
Braccio Shield
Voor een correct gebruik van het Braccio shield V4 is minimaal de IDE 1.7.11 nodig.
Op het Braccio shield V4 is een nieuwe feature aanwezig: de “ Soft-start ” . Deze functie is inbegrepen in de Braccio.begin()functie en start de Braccio zacht en veilig om de servomotoren de eerste 8 seconden te beschermen.
De Soft-start werkt elke keer dat u belt Braccio.begin(). Tijdens deze fase wordt de afscherming doesn ‘ t geven het maximale spanningsniveau aan de servomotoren en moet het Braccio niet gebruiken om gewicht te heffen.
Als de Braccio ergens tegenaan stoot of vergrendeld is, kan de resetbare zekering op het Braccio-schild de stroom naar de servomotor loskoppelen en is het nodig om de stroomconnector van het Braccio-schild los te koppelen en weer aan te sluiten.
Op deze manier kunt u normaal gesproken M1-M6-connectoren als digitaal gebruiken en kunt u Braccio gebruiken zonder de softstart.
Het schild heeft 12 standaard TinkerKit 3-pins connectoren.
De connectoren met het label M1 tot en met M6 zijn verbonden met de PWM-compatibele uitgangen van het Arduino-bord. De connectoren met het label I0 t / m I5 zijn analoge ingangen.
Elk van de motoraansluitingen heeft een beveiligingszekering:
- M1 tot en met M4 zijn beperkt tot 1.1A
- M5 en M6 zijn beperkt tot 750mA
De connectoren zijn verbonden met de volgende pinnen op het schild:
| Connectornaam | Veiligheidsspeld |
|---|---|
| M1 | 11 |
| M2 | 10 |
| M3 | 9 |
| M4 | 6 |
| M5 | 5 |
| M6 | 3 |
| I0 | A0 (ook bekend als 14) |
| I1 | A1 (15) |
| I2 | A2 (16) |
| I3 | A3 (17) |
| I4 | A4 (18) |
| I5 | A5 (19) |
| TWI | SCL, SDA |
| Serieel | RX0, TX0 |
Met de 4-pins TWI-connector kan uw Arduino-bord communiceren met apparaten die het TWI- (Two Wire Interface) of I2C (Inter-Integrated Circuit) -protocol ondersteunen via de Wire-bibliotheek in Arduino. Op de connector zijn aarde- en 5 volt aansluitingen voorzien.
OPMERKING: op de Arduino UNO gebruikt de I2C-bus analoge ingang 4 en 5 (A4 en A5), terwijl op de Arduino Mega de I2C-verbinding op pinnen 20 en 21 zit. Het gebruik van de TWI-connector op de UNO (en dergelijke) zal uitsluiten het gebruik van die analoge ingangen (A4 en A5).
Met de 4-pins SERIAL-connector kan het bord communiceren met andere apparaten die seriële communicatie ondersteunen. Gemak en aansluitingen van 5 volt zijn voor uw gemak op de connector aangebracht.
OPMERKING: Als u ‘ opnieuw verzenden of ontvangen van gegevens naar en van de computer deze seriële connector is niet beschikbaar.
Het schild bevat drie status-LED’s:
- Groene LED (LED AAN) geeft aan dat de afscherming aan is
- Een andere groene LED (LED OK) geeft aan dat de afscherming correct is gevoed
- Een rode LED (LED ERR) geeft aan dat de afscherming niet correct is gevoed
Met een standaard 6 mm drukknop kunt u het bord resetten, en er is een aansluiting voor de externe 5V 5000 mA voeding.
TinkerKit Braccio Library
Om uw TinkerKit Braccio te gebruiken, moet u de Braccio-bibliotheek laden met behulp van de Bibliotheekbeheerder van de Arduino Software (IDE); zie deze instructies voor details over het installeren van bibliotheken.

Er zijn slechts twee functies beschikbaar in deze bibliotheek.
Braccio.Begin()
Initialiseer en stel de beginpositie voor Braccio in
Alle servomotoren worden in de “veiligheids” -positie geplaatst:
Basis (M1): 90 graden
Schouder (M2): 45 graden
Elleboog (M3): 180 graden
Pols verticaal (M4): 180 graden
Pols rotatie (M5): 90 graden
Grijper (M6): 10 graden
Braccio.ServoMovement (stapvertraging, M1, M2, M3, M4, M5, M6)
Met deze functie kunt u alle Braccio controle ‘ s servo’s met slechts één opdracht
Step Delay: een milliseconden vertraging tussen de beweging van elke servo. Toegestane waarden van 10 tot 30 msec.
M1: basis graden. Toegestane waarden van 0 tot 180 graden
M2: schoudergraden. Toegestane waarden van 15 tot 165 graden
M3: ellebooggraden. Toegestane waarden van 0 tot 180 graden
M4: pols verticale graden. Toegestane waarden van 0 tot 180 graden
M5: polsrotatie graden. Toegestane waarden van 0 tot 180 graden
M6: grijper graden. Toegestane waarden van 10 tot 73 graden. 10: de tong is open, 73: de grijper is gesloten.
Bron: Arduino.cc