

Introductie
De Tello SDK maakt verbinding met de Tello EDU via een Wi-Fi UDP-poort, zodat gebruikers kunnen de Tello EDU besturen met tekst opdrachten. Na het downloaden en installeren van Python download het bestand Tello3.py via de link:
https://dl-cdn.ryzerobotics.com/downloads/tello/20180222/Tello3.py
* Tello3.py is een voorbeeldprogramma gebaseerd op Python dat een UPD-communicatiepoort tot stand brengt, wat dat wel kan eenvoudige interactie met Tello implementeren, inclusief het verzenden van SDK-instructies naar Tello en het ontvangen van Tello informatie. Tello3.py is alleen ter referentie en de gebruiker kan het verder ontwikkelen.
Architectuur
Maak gebruik van de Wi-Fi om de verbinding tot stand te brengen tussen de Tello en pc, Mac of mobiel apparaat.
Stuur opdracht en ontvang antwoord
Tello IP: 192.168.10.1 UDP-POORT: 8889 << – – >> PC / Mac / mobiel
Stap 1: Stel een UDP-client in op de pc, Mac of mobiel om berichten van te verzenden en ontvangen van de Tello via dezelfde poort.
Stap 2: Voordat u andere commando’s verstuurt, stuurt u “commando” naar de Tello via UDP PORT 8889 naar initiërende SDK-modus.
Ontvang Tello status
Tello IP: 192.168.10.1 – >> PC / Mac / mobiele UDP-server: 0.0.0.0 UDP POORT: 8890
Stap 3: Stel een UDP-server in op de pc, Mac of mobiel en controleer het bericht van IP 0.0.0.0 via UDP-POORT 8890. Stap 1 en 2 moeten worden voltooid voordat u stap 3 probeert. Voor meer informatie details, zie de Tello staus sectie.
* Raadpleeg het gedeelte Tello State voor details.
Ontvang Tello-videostream
Tello IP: 192.168.10.1 – >> PC / Mac / mobiele UDP-server: 0.0.0.0 UDP-POORT: 11111
Stap 4: Stel een UDP-server in op de pc, Mac of mobiel apparaat en controleer het bericht van IP 0.0.0.0 via UDP-POORT 11111.
Stap 5: Stuur “streamon” naar de Tello via UDP-POORT 8889 om te beginnen met streamen. Stappen 1 en 2 moeten zijn voltooid zijn voordat u stap 5 probeert.
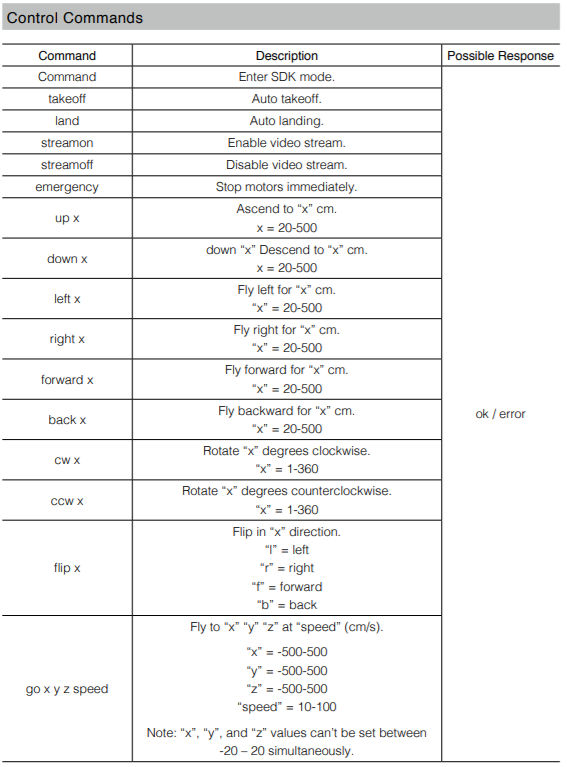
Tello-opdrachttypen en resultaten
De Tello SDK bevat drie basistypen commando’s.
Besturingsopdrachten (xxx)
- Geeft “ok” terug als de opdracht succesvol was.
- Retourneert “fout” of een informatieve resultaatcode als de opdracht is mislukt.
Stel Commando (xxx a) in om nieuwe subparameterwaarden in te stellen
- Geeft “ok” terug als de opdracht succesvol was.
- Retourneert “fout” of een informatieve resultaatcode als de opdracht is mislukt.
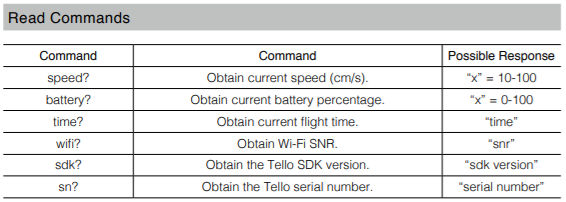
Tello opdrachten

Tello Staus
Gegevenstype: String
Datastring ontvangen wanneer de functie voor het detecteren van het missiepad is ingeschakeld:
“Ata string ontvangen wanneer de mission pad-detectiefunctie is ingeschakeld: requency is 10 Hz.ltheof:% d; h:% d; bat:% d; baro:% f; \ r \ nm
Datastring ontvangen wanneer de functie voor het detecteren van het missiepad is uitgeschakeld:
“Toonhoogte:% d; rol:% d; gieren:% d; vgx:% d; vgy% d; vgz:% d; templ:% d; temph:% d; tof:% d; h:% d; bat:% d; baro:%
.2f; tijd:% d; agx:%. 2f; agy:%. 2f; agz:%. 2f; \ r \ n “
Omschrijving
“Mid” = de ID van het Mission Pad gedetecteerd. Als er geen Mission Pad wordt gedetecteerd, wordt een “-1” bericht weergegeven.
“X” = de “x”-coördinaat gedetecteerd op het Mission Pad. Als er geen Mission Pad is, zal een “0” bericht worden weergegeven.
“Y” = de “y”-coördinaat gedetecteerd op het Mission Pad. Als er geen Mission Pad is, zal een “0” bericht worden weergegeven.
“Z” = de “z” -coördinaat gedetecteerd op het Mission Pad. Als er geen Mission Pad is, zal een “0” bericht worden weergegeven.
pitch = de mate van de attitude-toonhoogte.
roll = de mate van de attitude-rol.
gieren = de mate van de gierstand. (gier = draaien)
vgx = de snelheid van de “x” -as.
vgy = de snelheid van de “y” -as.
vgz = de snelheid van de “z” -as.
templ = de laagste temperatuur in graden Celsius.
temph = de hoogste temperatuur in graden Celsius
tof = de vliegtijdafstand in cm.
h = de hoogte in cm.
bat = het percentage van het huidige batterijniveau.
baro = de barometermeting in cm.
tijd = de hoeveelheid tijd dat de motor is gebruikt.
agx = de versnelling van de “x” -as.
agy = de versnelling van de “y” -as.
agz = de versnelling van de “z” -as.
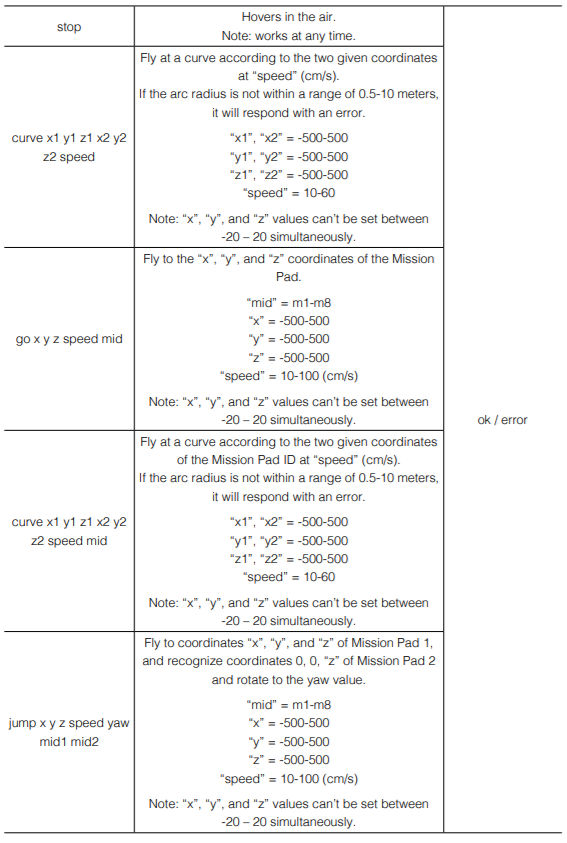
mid-commando’s worden alleen gebruikt met een Mission Pad. mid-opdrachten zijn onder meer:
mid-opdrachten
mon
moff
mdirection “x”
ga “x” “y” “z” “speed” “mid”
curve “x1” “y1” “z1” “x2” “y2” “z2” “speed” “mid”
jump”x” “y” “z” “speed” “yaw” mid1 mid2
Lees voor meer informatie de Mission Pad-gebruikershandleiding op de officiële RYZE-website.
Veiligheids optie
Als er gedurende 15 seconden geen commando is, zal de Tello automatisch landen.
Reset Tello Wi-Fi
Zorg ervoor dat de Tello is ingeschakeld en houd de aan / uit-knop vijf seconden ingedrukt. De indicatoren gaan uit en knipperen langzaam geel. Wanneer de Wi-Fi SSID en het wachtwoord zijn gereset naar de standaardinstellingen knippert de indicator snel geel. Merk op dat er standaard geen wachtwoord is ingesteld.
BRON: https://www.ryzerobotics.com/